Главное меню
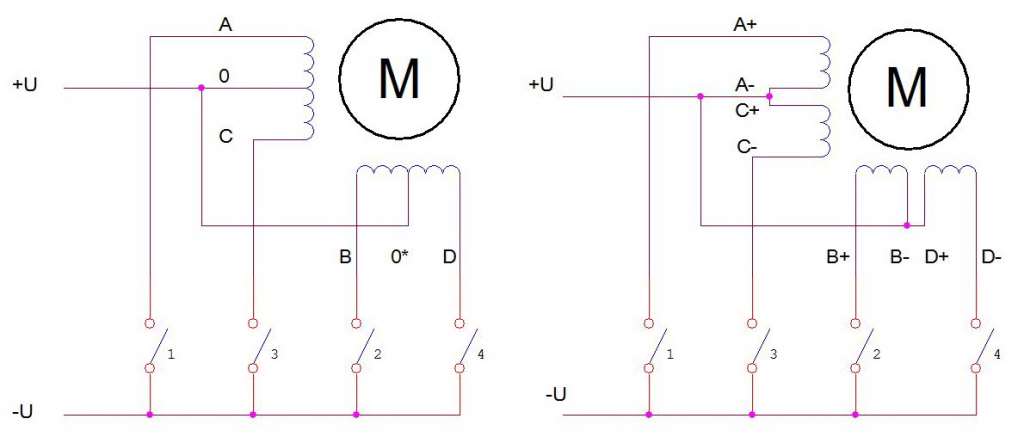
Шаговые двигатели и микросхемы управления для них получили широкое распространение во многих областях человеческой деятельности благодаря их техническим особенностям, среди которых:. Электропривод на базе шаговых двигателей получил широкое распространение в самых различных приборах — в научном, промышленном, офисном и медицинском оборудовании, на транспорте, в авиации и многих других приложениях, в частности:. Наибольшее распространение в промышленных применениях нашли гибридные шаговые двигатели ГШД , они обеспечивают небольшую величину шага, большой момент и значительную скорость. В зависимости от конфигурации обмоток двигатели делятся на биполярные и униполярные. Биполярные имеют одну обмотку в каждой фазе четыре вывода , униполярные имеют или дополнительные выводы от середин каждой обмотки пять или шесть выводов , или четыре отдельные обмотки восемь выводов.












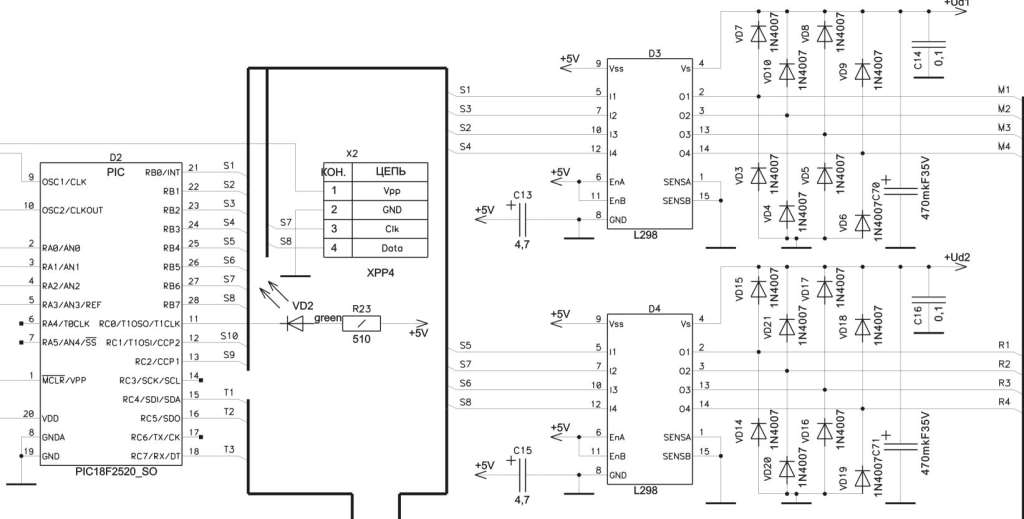
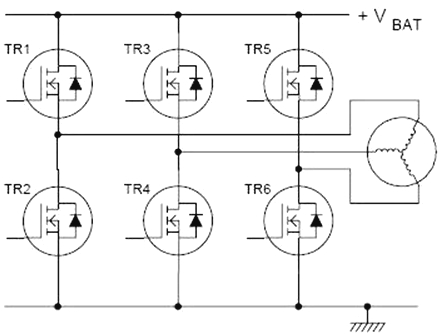
Рассмотрим драйвер электродвигателей на транзисторах и микросхеме L, разберемся с принципом работы H-моста. Узнаем особенности подключения драйверов на L к разным двигателям и источникам питания, проведем простые эксперименты с шаговыми движками и двигателями постоянного напряжения. Подключение к Raspberry Pi и простейшие программы для теста управления драйвером. При проектировании станков, роботов и других автоматизированных устройств возникает необходимость управлять электродвигателем постоянного тока или же катушками шагового движка. Для того, чтобы иметь возможность управлять обмоткой двигателя и заставить его вал вращаться в разные стороны, необходимо выполнять коммутацию их питания с переполюсовкой.

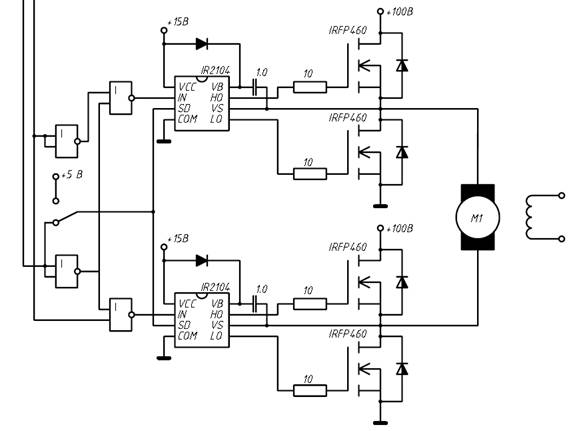



Еще одним методом стабилизации тока в обмотках двигателя является ключевое широтно-импульсное регулирование. Современные драйверы шаговых двигателей используют именно этот метод. Ключевой стабилизатор обеспечивает высокую скорость нарастания тока в обмотках вместе с простотой его регулирования и очень низкими потерями. Еще одним преимуществом схемы с ключевой стабилизацией тока является и то, что она поддерживает момент двигателя постоянным, независимо от колебаний напряжения питания. Это позволяет использовать простые и дешевые нестабилизированные источники питания. Для обеспечения высокой скорости нарастания тока используют напряжение источника питания, в несколько раз превышающее номинальное.